so, 5 months later. I blew up the batteries in august, so i just bought a 7 amp gelcell 12 volt battery. Tower hobbies says it should hold up to my intentions, if not, It has a 90 day warranty.
Also, I'm going to put 6 wheel steer on it, money providing (goal: by my senior year, it won't be autonomous, but i'll be able to control it solely by video feed(s) to within an inch of whatever i'm going around)
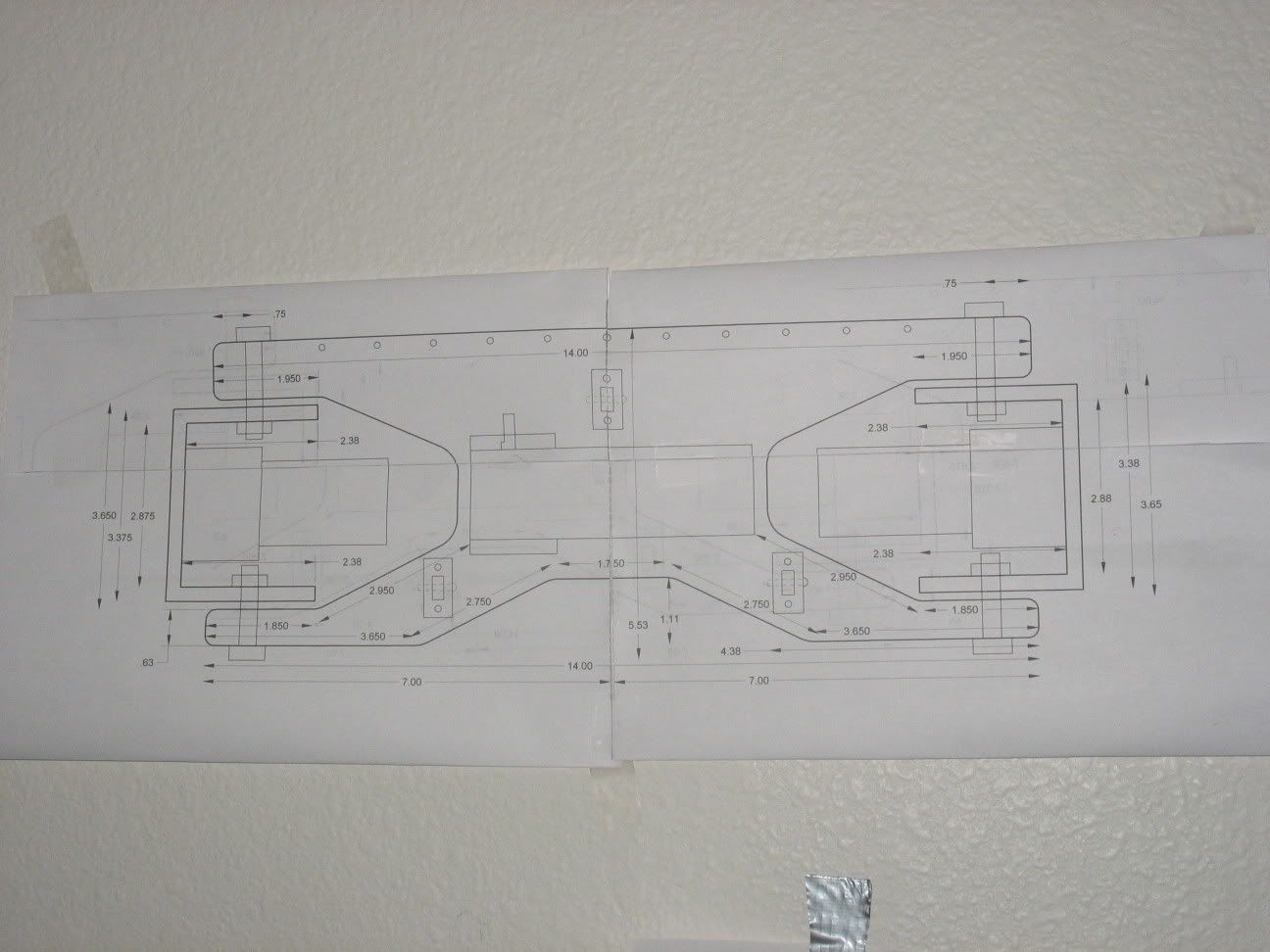
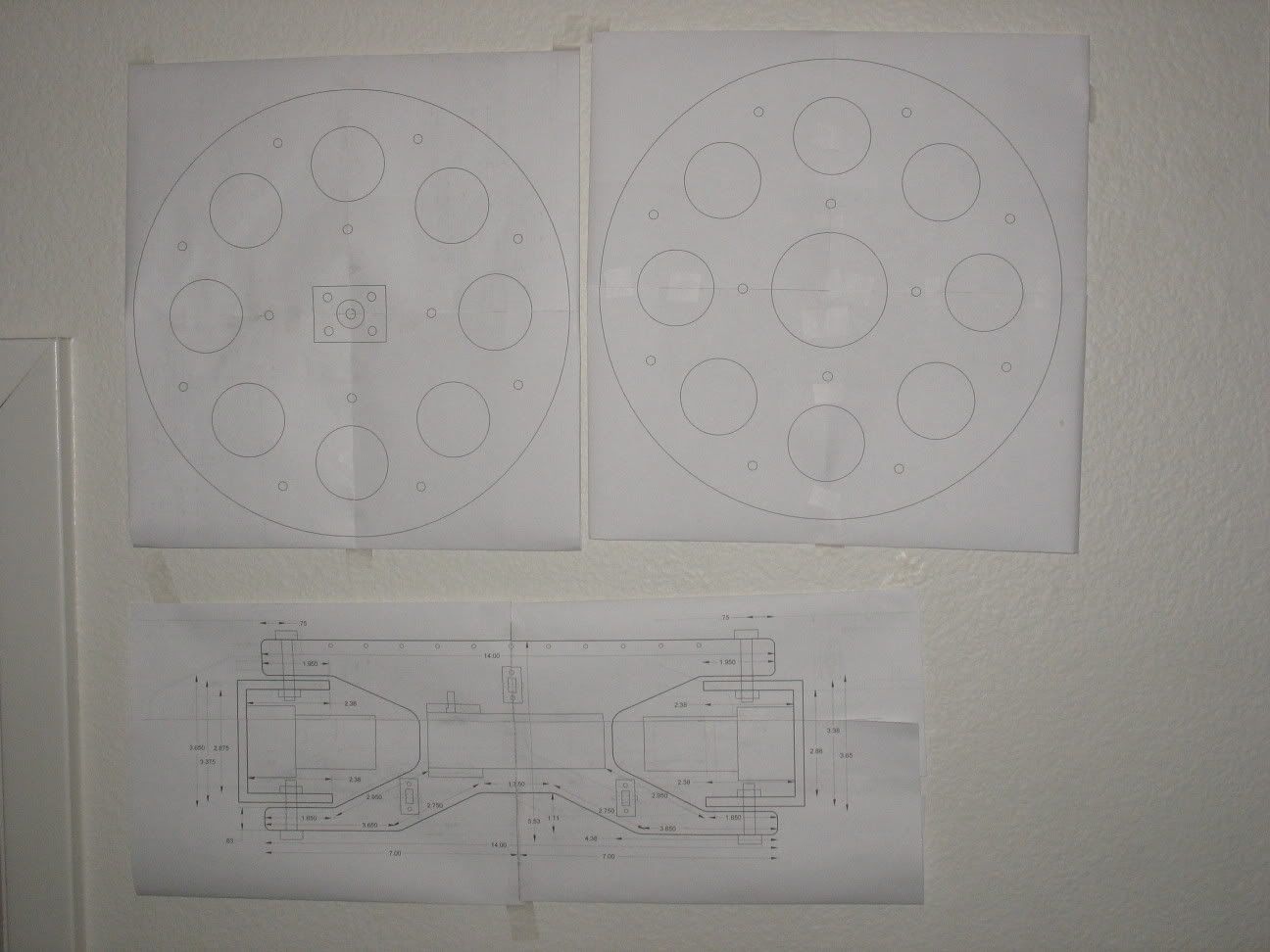
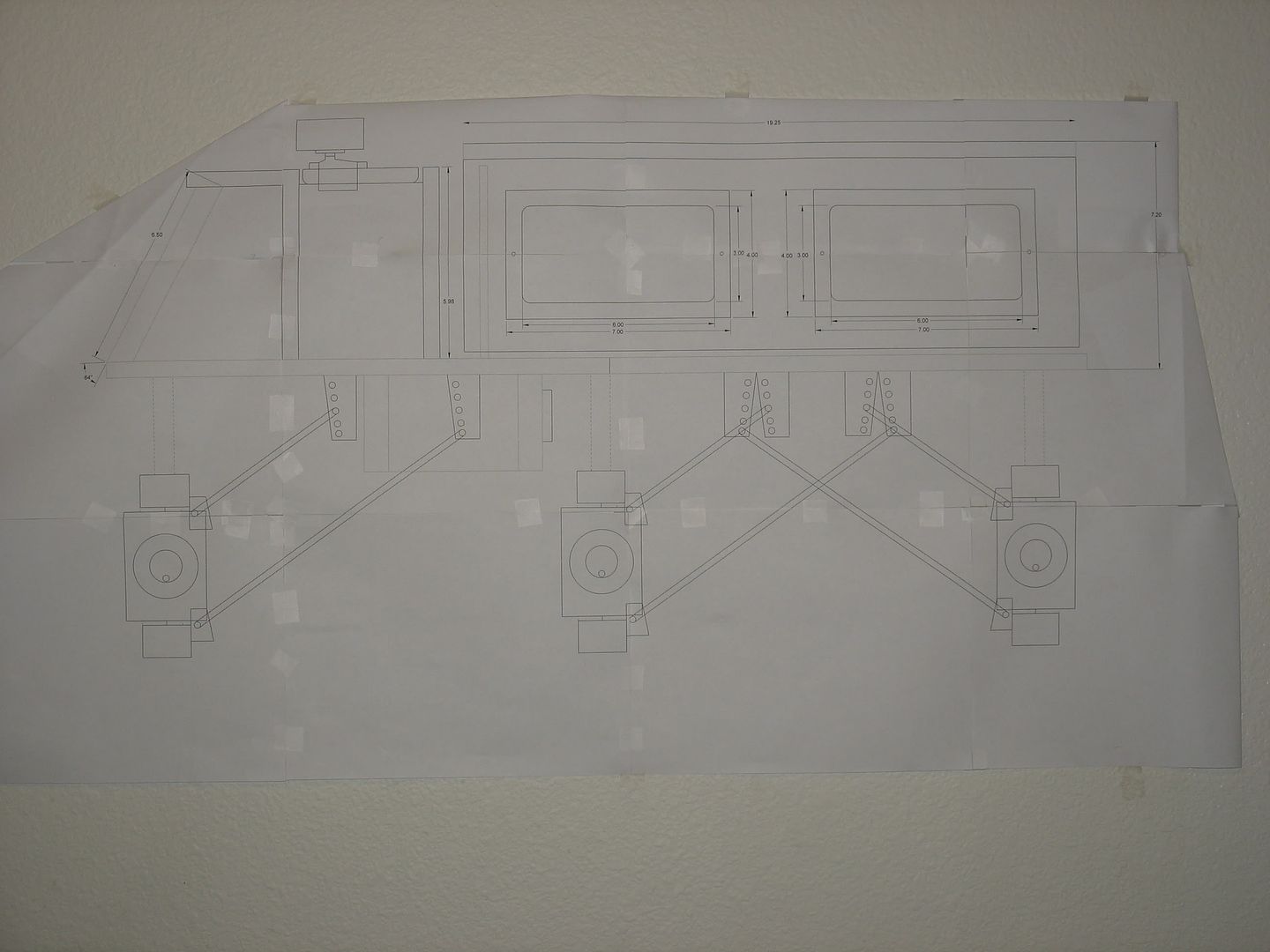
As of right now i'm thinking to basically make an AIRT2, I'll use the same camo templates (I kept them somewhere), but it will be longer, just as wide, 6 wheel drive/steer (crab walk or countersteer), and have 12" tall 1.5" wide wheels instead of 10" tall 1/2" wide ones now. The chassis will be 2 inches longer (I believe that's how it's drawn up so far), and the front/rear axles will be more outboard to make up the tire radius difference. Axles will be suspended by 4 shocks per axle (same as now) with a 3 link + track bar setup. So it should also be far more articulate compared to the current sway bars. It will use the same 7 amp battery, the existing 6 wheel motors plus a steer motor on each axle, plus a few more headlamps- 4 on the front axle, 2 on the outboard corners of the chassis (10 degrees pointed down), and 2 above the cab (pointed 15 degrees down).
The 7 amp battery will run just about the entire robot for the short term, but there will be more batteries down the road.
Big picture changes:
The camera will be re-located on top of the cab, and the mount will be double-sided, so that a second camera can be placed back-to-back with the first. This is how i'll get the close navigational tolerances. Ideally I'd like both camera screens to be able to appear on the same monitor at once, but not sure what exactly would need to be done wiringly to make it happen.
6 wheel steer
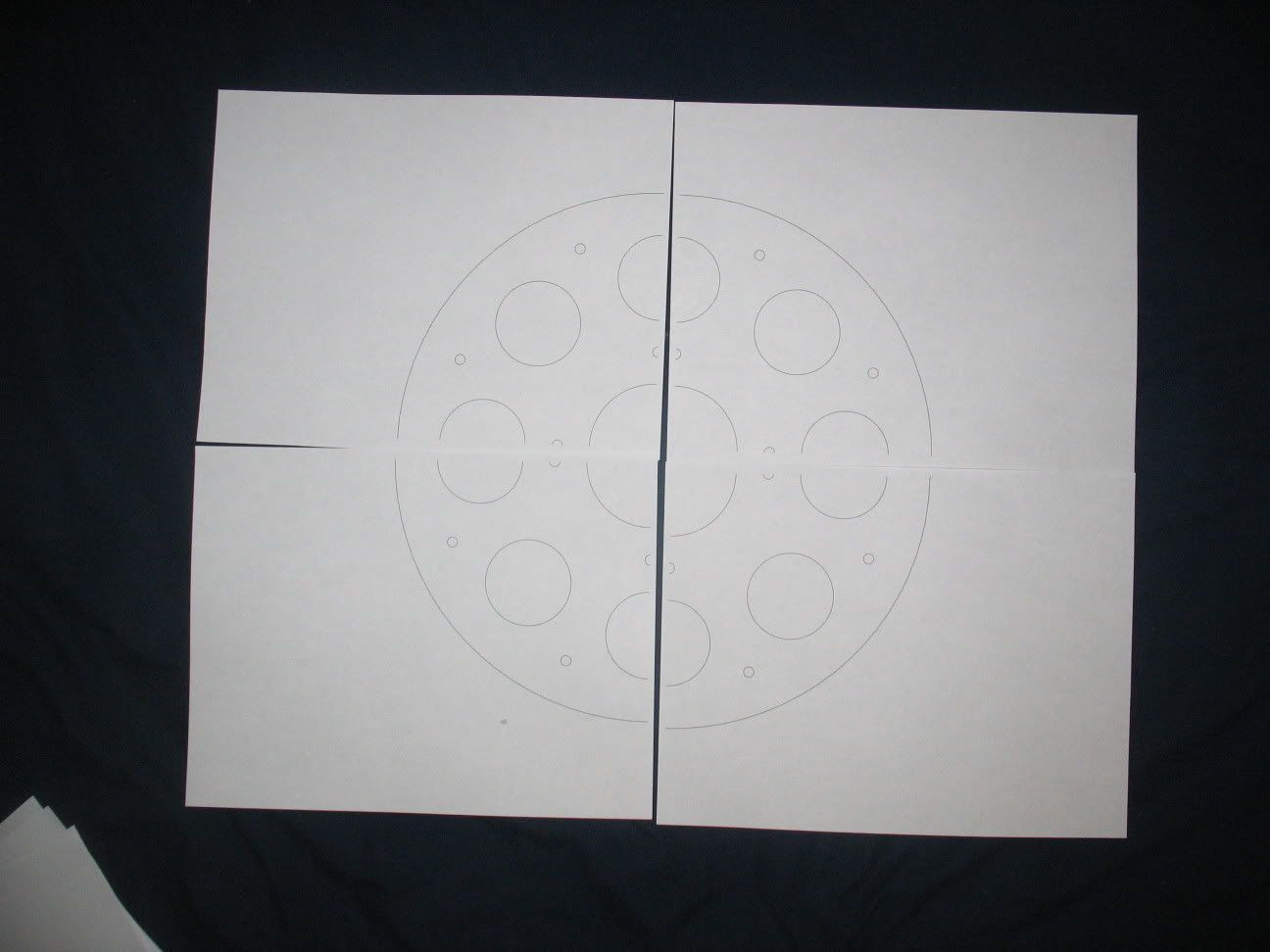
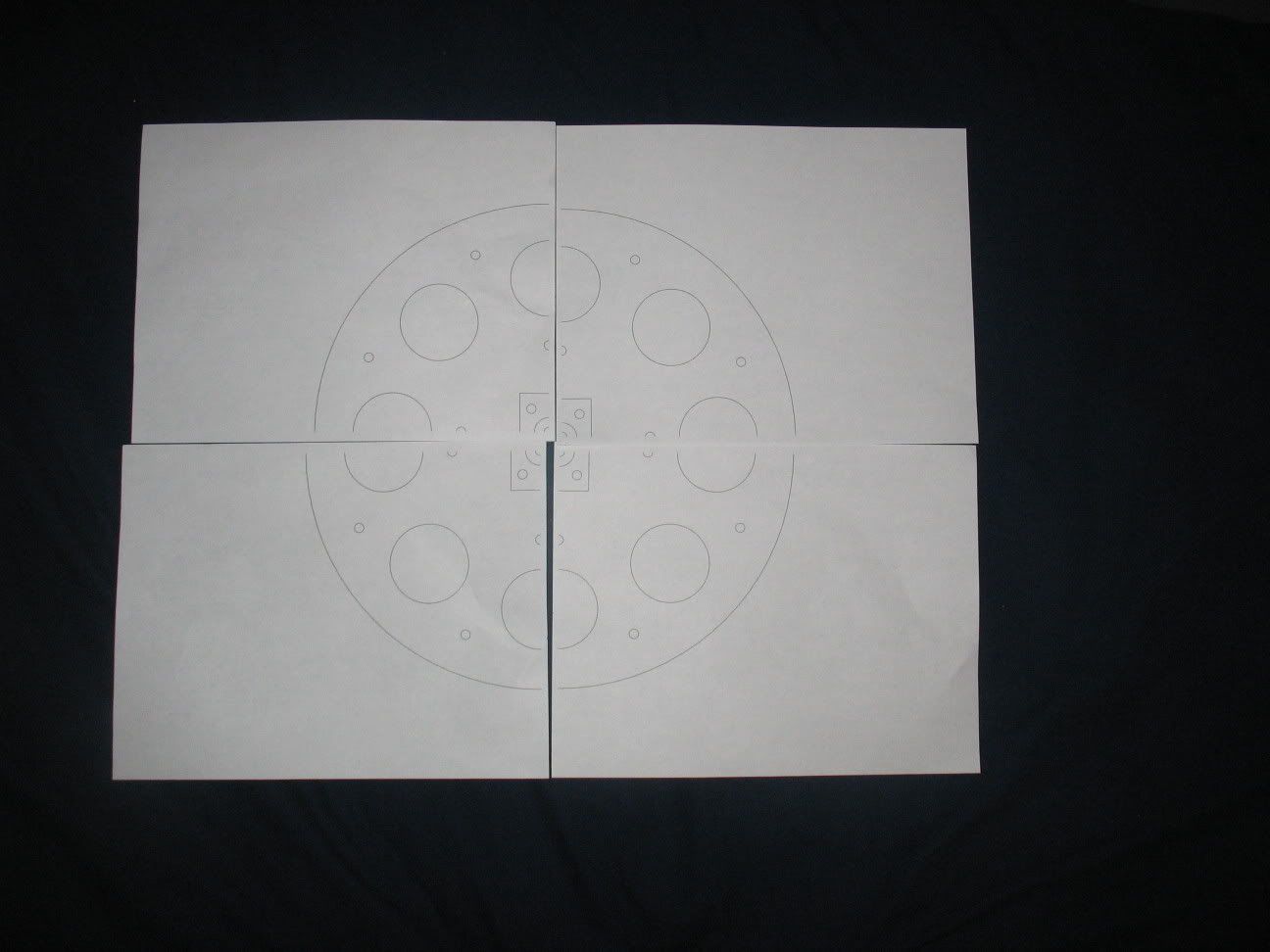
12" tall, 1" wide tires, wrapped in 2 layers of inner-tube
2-4" Longer
aluminum 1 piece cargo-bay doors with integrated windows (shuttle-style)
3 Link + track bar suspension
Three motor control units, 1 per axle
1/4" thick steel plate to reinforce weak areas of wood (suspension)
3/4" plywood base + electronics box, with 40mm fan on elecs
1/2" aluminum bulkheads + cab/battery bay
basically, the only wood will be the 3/4" base, the electronics box, and the 2x6 main suspension truss (with 1/4" steel plate bracing along the top and bottom fatigue lines).
The 1/2" aluminum plate I can get locally then cut down in the race shop (i'll try to trade the unused plywood for a little bit of spare shop time)
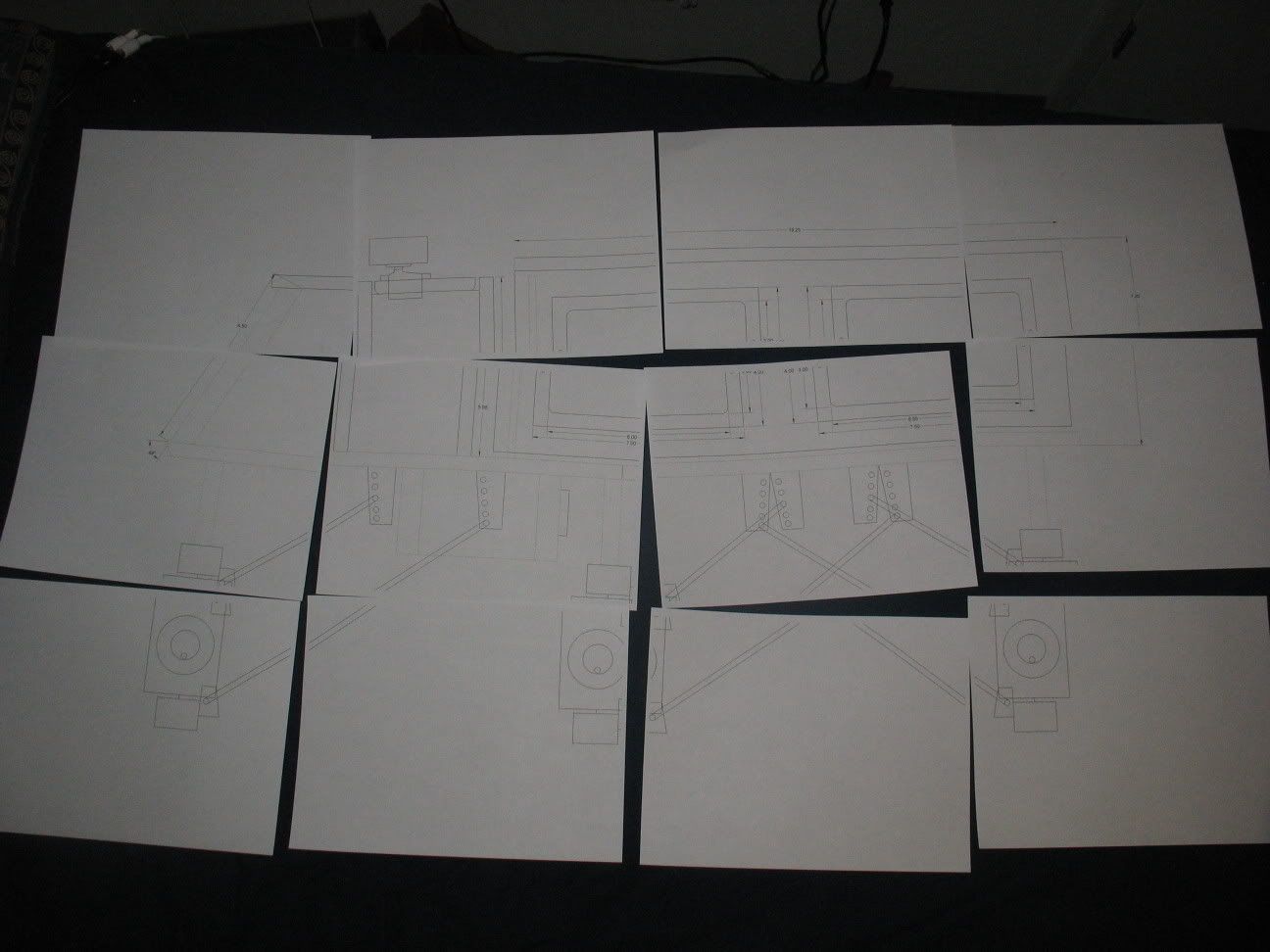
I should have a CAD version sometime soon. I have a rough sketch, just gotta digitize it.